Dele:



3 systemer av lineære ligninger og hvordan man løser dem
den lineære ligninger de er polynomiske ligninger med en eller flere ukjente. I dette tilfellet blir de ukjente ikke forhøyet til makter, og de blir heller ikke multiplisert med hverandre (i dette tilfellet er det sagt at ligningen er av grad 1 eller første grad).
En ligning er en matematisk likestilling der det er ett eller flere av et ukjent element som vi vil ringe ukjent eller ukjent i tilfelle at det er mer enn ett. For å løse denne ligningen er det nødvendig å finne ut av verdien av de ukjente.
En lineær ligning har følgende struktur:
til0· 1 + a1· X1+ til2· X2+... + an· Xn= b
Hvor til0, til1, til2,..., an er reelle tall som vi kjenner til deres verdi og kalles koeffisienter, b er også et kjent ekte tall som kalles selvstendig term. Og til slutt er de X1, X2,..., Xn som er det som er kjent som ukjente. Dette er variablene hvis verdi ikke er kjent.
Et system med lineære ligninger er et sett lineære ligninger hvor verdien av de ukjente er den samme i hver ligning.
Logisk sett er måten å løse et system av lineære ligninger tilordnet verdier til ukjente, slik at likestilling kan verifiseres. Det vil si at de ukjente må beregnes slik at alle ligningene i systemet blir oppfylt samtidig. Vi representerer et system med lineære ligninger som følger
til0· 1 + a1· X1 + til2· X2 +... + an· Xn = an + 1
b0· 1 + b1· X1 + b2· X2 +... + bn· Xn = bn + 1
c0· 1 + c1· X1 + c2· X2 +... + cn· Xn = cn + 1
... .
d0· 1 + d1· X1 + d2· X2 +... + dn· Xn = dn + 1
hvor a0, til1,..., an,b0,b1,..., bn ,c0 ,c1,..., cn etc oss ekte tall og ukjente å løse er X0,..., Xn ,Xn + 1.
Hver lineær ligning representerer en linje og derfor representerer et system av ligninger av N lineære ligninger N rett tegnet i rommet.
Avhengig av antall ukjente som hver lineær ligning har, vil linjen som representerer ligningen bli representert i en annen dimensjon, det vil si en ligning med to ukjente (for eksempel 2 · X1 + X2 = 0) representerer en linje i et todimensjonalt rom, en ligning med tre ukjente (for eksempel 2 · X1 + X2 - 5 · X3 = 10) vil bli representert i et tredimensjonalt rom og så videre.
Ved løsning av et system av ligninger, er verdiene for X0,..., Xn ,Xn + 1 Skje til å være kuttpunktene mellom linjene.
Ved å løse et system av ligninger kan vi nå ulike konklusjoner. Avhengig av hvilken type resultat vi oppnår, kan vi skille mellom 3 typer systemer av lineære ligninger:
1- Ubestemt kompatibilitet
Selv om det kan høres ut som en vits, er det mulig at når vi prøver å løse ligningssystemet, kommer vi fram til en åpenhet i stilen 0 = 0.
Denne typen situasjon oppstår når det er uendelige løsninger for systemet med ligninger, og dette skjer når det viser seg at i vårt likestillingssystem representerer ligningene samme linje. Vi kan se det grafisk:
Som et system av ligninger tar vi:
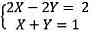
Ved å ha 2 ligninger med 2 ukjente å løse kan vi representere linjene i et todimensjonalt plan
Som vi kan se linjene med det samme, falle alle punkter i den første ligningen sammen med de i den andre ligningen, derfor har den så mange punkter som punkter som linjen har, det vil si uendelighetene.
2- Inkompatibel
Når vi leser navnet, kan vi forestille oss at vårt neste system av ligninger ikke vil ha en løsning.
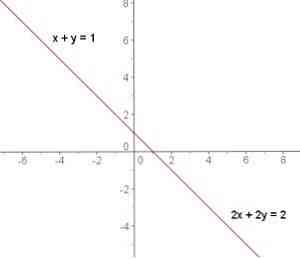
Hvis vi prøver å løse, for eksempel, dette system av ligninger
Grafisk ville det være:
Hvis vi multipliserer alle betingelsene i den andre ligningen, oppnår vi at X + Y = 1 er lik 2 · X + 2 · Y = 2. Og hvis dette siste uttrykket trekkes fra den første ligningen, får vi det
2 · X-2 · X + 2 · Y -2 · Y = 3-2
Eller hva er det samme
0 = 1
Når vi er i denne situasjonen, betyr det at linjene som er representert i ligningssystemet, er parallelle, noe som betyr at de per definisjon aldri blir kuttet og det ikke er noe kuttpunkt. Når et system presenteres på denne måten, sies det å være inkonsekvent uavhengig.
3- Bestemt støtte
Til slutt kommer vi til det tilfellet der vårt likestillingssystem har en enkelt løsning, hvor vi har linjer som skjærer og genererer et skjæringspunkt. La oss se et eksempel:
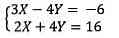
For å løse det kan vi legge til de to ligningene slik at vi får det
(3 · X-4 · Y) + (2 · X + 4 · Y) = -6 + 16
Hvis vi forenkler, har vi igjen
5 · X + 0 · Y = 5 · X = 10
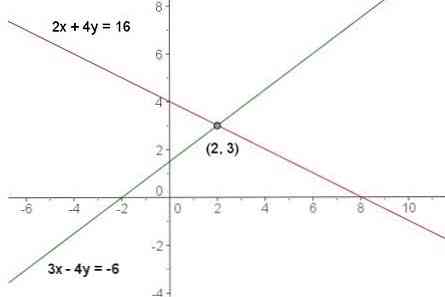
Fra hvilken vi lett utledes at X = 2 og erstatter eller X = 2 i noen av de opprinnelige ligningene får vi Y = 3.
Visuelt ville det være:
Metoder for å løse systemer av lineære ligninger
Som vi har sett i forrige avsnitt, for systemer med 2 ukjente og 2 likninger, basert på enkle operasjoner som tillegg, subtraksjon, multiplikasjon, divisjon og substitusjon, kan vi løse dem om noen minutter. Men hvis vi prøver å anvende denne metoden på systemer med flere likninger og flere ukjente, blir beregningene kjedelige, og vi kan enkelt feile.
For å forenkle beregningene er det ulike metode for oppløsning, men absolutt de mest utbredte metodene er Rule of Cramer og Gauss-Jordan eliminasjon.
Cramer metode
For å forklare hvordan denne metoden er brukt er viktig å vite hva din matrise og finne sin determinant vet, gjør en parentes å definere disse to begrepene.
en matrise det er ikke noe mer enn et sett med tall eller algebraiske symboler plassert i horisontale og vertikale linjer og arrangert i form av et rektangel. For vårt tema vil vi bruke matrisen som en mer forenklet måte å uttrykke vårt system av ligninger på.
La oss se et eksempel:
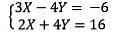
Det vil være systemet med lineære ligninger
Dette enkle system av likninger vi kan oppsummere er operasjonen av to 2 × 2 matriser som resulterer i en 2 × 1 matrise.
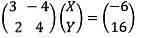
Den første matrisen tilsvarer alle koeffisientene, den andre matrisen er ukjente å løse og matrisen ligger etter likestilling er identifisert med de uavhengige betingelsene i ligningene
den determinant er en operasjon som brukes på en matrise hvis resultat er et reelt tall.
I tilfelle av matrisen som vi har funnet i vårt tidligere eksempel, vil dens determinant være:

Når konseptene med matrise og determinant er definert, kan vi forklare hva Cramer-metoden består av.
Med denne metoden kan vi enkelt løse et system med lineære ligninger så lenge systemet ikke overskrider de tre ligningene med tre ukjente siden beregningen av determinanter av en matrise er svært vanskelig for matriser på 4 × 4 eller høyere. I tilfelle av et system med mer enn tre lineære ligninger, anbefales metoden ved eliminering av Gauss-Jordan.
Fortsettelse med forrige eksempel, ved hjelp av Cramer, må vi bare beregne to determinanter, og med det finner vi verdien av våre to ukjente.
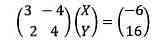
Vi har vårt system:
Og vi har et system representert av matriser:
Verdien av X er funnet:
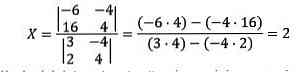
Bare i beregningen av determinanten som er plassert i nevner av divisjonen, har vi erstattet den første kommunen for matrisen av uavhengige vilkår. Og i nevneren av divisjonen har vi determinant av vår originale matrise.
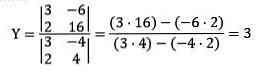
Utfører de samme beregningene for å finne Y vi oppnår:
Eliminering av Gauss-Jordan
Vi definerer utvidet matrise til matrisen som kommer fra et system av ligninger hvor vi legger til de uavhengige vilkårene på slutten av matrisen.
Metoden ved eliminering av Gauss-Jordan består av operasjoner mellom rader i matrisen for å transformere vår utvidede matrise til en mye enklere matrise der jeg har nuller i alle feltene unntatt i diagonalen, hvor jeg må skaffe noen. Som følger:

Hvor X og Y ville være ekte tall som tilsvarer våre ukjente.
La oss løse dette systemet ved å eliminere Gauss-Jordan:



Vi har allerede klart å få en null i nedre venstre del av matrisen vår, det neste trinnet er å få en 0 i øvre høyre del av den.


Vi har oppnådd en 0 i øverst til venstre i matrisen, nå er vi bare nødt til å konvertere de diagonale seg og vi har løst våre system Gauss-Jordan.
Derfor kommer vi til den konklusjonen at:

referanser
- vitutor.com.
- algebra.us.es.
- Systemer av lineære ligninger (uten dato). Gjenopprettet fra uco.es.
- Systemer av lineære ligninger. Kapittel 7. (utated). Hentet fra sauce.pntic.mec.es.
- Lineær Algebra og Geometri (2010/2011). Systemer av lineære ligninger. Kapittel 1. Institutt for algebra. Universitetet i Sevilla. Spania. Gjenopprettet fra algebra.us.es.